Asenkron motorların en büyük problemi kutup sayılarına göre gerisinden gittikleri devirden fazla uzaklaştıklarında devrilme diye bir hadise yaşarlar, yani motoru bir yere kadar zorlayıp yavaşlattıktan sonra direncini kırarsınız.
Asenkron bir motor 50 Hz'lik şebeke gerilimi ile çalışırken;
Eğer iki kutuplu ise 50Hz * 60(sn) *2 / kutup sayısı = 3000 devir/dk altında bir devirde dönmek ister. Bu da pratikte 2800-2850 gibi bir değere karşılık düşebilir.
Eğer dört kutuplu ise 50Hz * 60(sn) *2 / kutup sayısı = 1500 devir/dk altında bir devirde dönmek ister. Bu da yukardaki ile orantılı bir değerde olur.
Eğer altı kutuplu ise 50Hz * 60(sn) *2 / kutup sayısı = 1000 devir/dk altında bir devirde dönmek ister. "" ""
Eğer sekiz kutuplu ise 50Hz * 60(sn) *2 / kutup sayısı = 750 devir/dk altında bir devirde dönmek ister. "" ""
Bir motor ister elektrikli ister benzinli olsun, yük altında adam gibi direnebildiği devir aralığı, devir düştükçe torkun arttığı aralıktır. ( Yani otomobilinile yarışırken otonuzun torku kaç devirde geliyorsa hızlanırken üst vitese atınca o devri görmelisiniz.)
Bu linkteki aramada göreceğiniz tork eğrilerinde torkun tepesinin sol tarafındaki devirler işinize zımpara yaparken yaramayan, faydasını göremeyeceğiniz devirlerdir:
https://www.google.com.tr/search?q=asynchronous+motor+torque+graph&tbm=ischİşinize yarayanlar ise "devir düştükçe torkun arttığı" yani tork tepesinin sağındaki değerlerdir.
Misal:

Bu grafiğin motorunda %80'den düşük devirlerde hayır beklemeyin. Bu motoru besleyen gerilimi (frekans ile oynamadan) düşürdüğünüzde bu eğrinin aşağıya doğru kaydığını göreceksiniz. Tepe alçalınca devrilme torku düşecek ancak motorun çalışabildiği devir aralığını öyle istediğiniz gibi değiştirmiş olmayacaksınız.
Motoru besleyen frekansı değiştirmek yani VFD kullanmak:
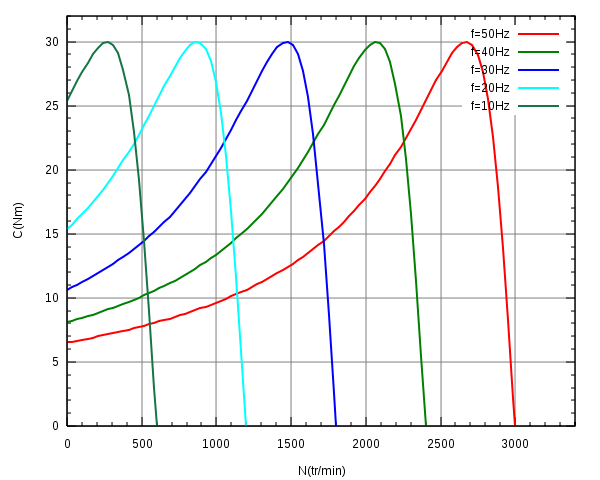
Bu tork eğrisinde motorun çalıştığı devir aralıklarının frekans ile birlikte isteğimize uyan şekilde değiştiğini görebilirsiniz.
 17 Yanıt
17 Yanıt 4774 Gösterim
4774 Gösterim